The Big Debate: Rotary vs. Linear Actuators in Humanoid Robotics
The critical design choice between rotary and linear actuators in humanoid robotics shapes:
– Performance characteristics,
– Manufacturing constraints,
– Which robots will win or lose
Here’s a deep dive into @GoingBallistic5 & @MarwaEldiwiny's podcast:
INSIDE A ROTARY ACTUATOR:
Rotary actuators directly generate rotation that can be applied to robot joints.
Think of electric motors that create turning motion.
Rotary actuators: Generate rotation directly → apply to the joint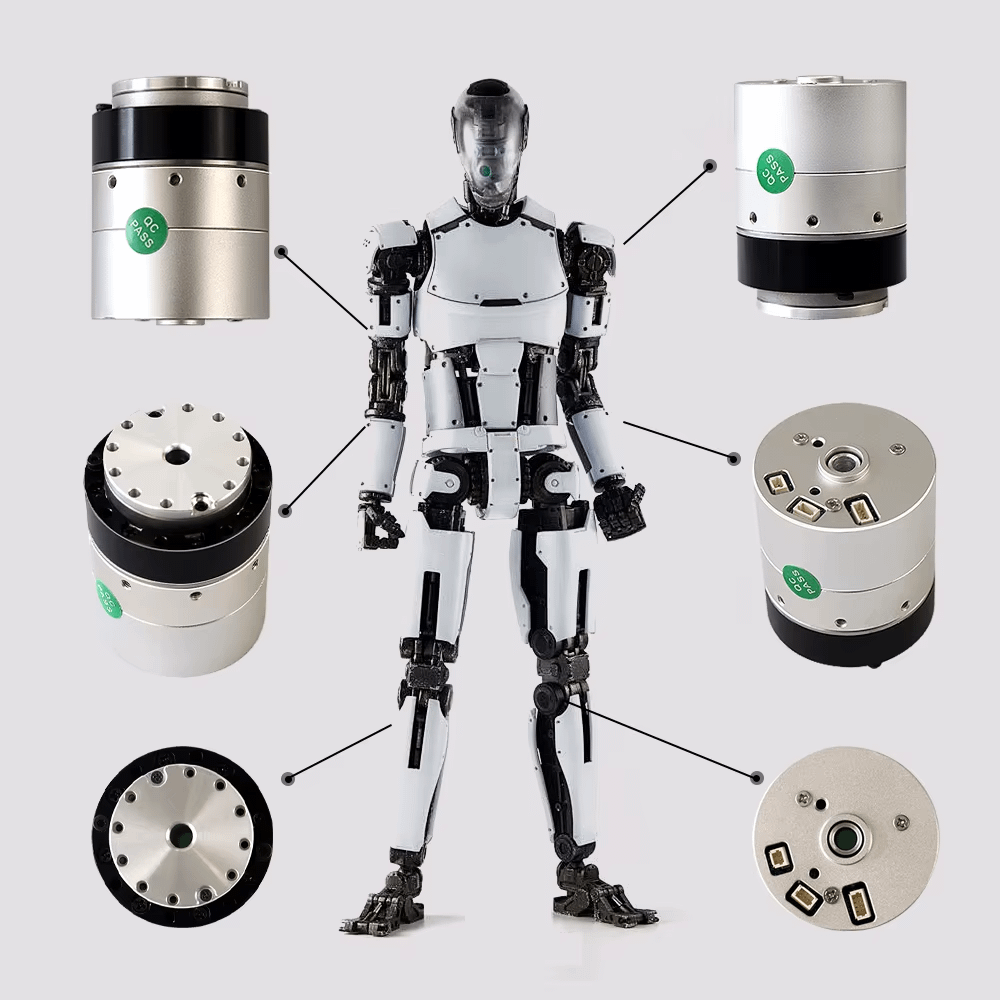
INSIDE A LINEAR ACTUATOR:
Linear actuators convert rotation into straight-line motion, then back to rotation for joints.
They use mechanisms like planetary roller screws, Ball screws or lead
screws.
Linear actuators: Generate rotation → convert to linear motion → convert back to rotation at the joint through linkages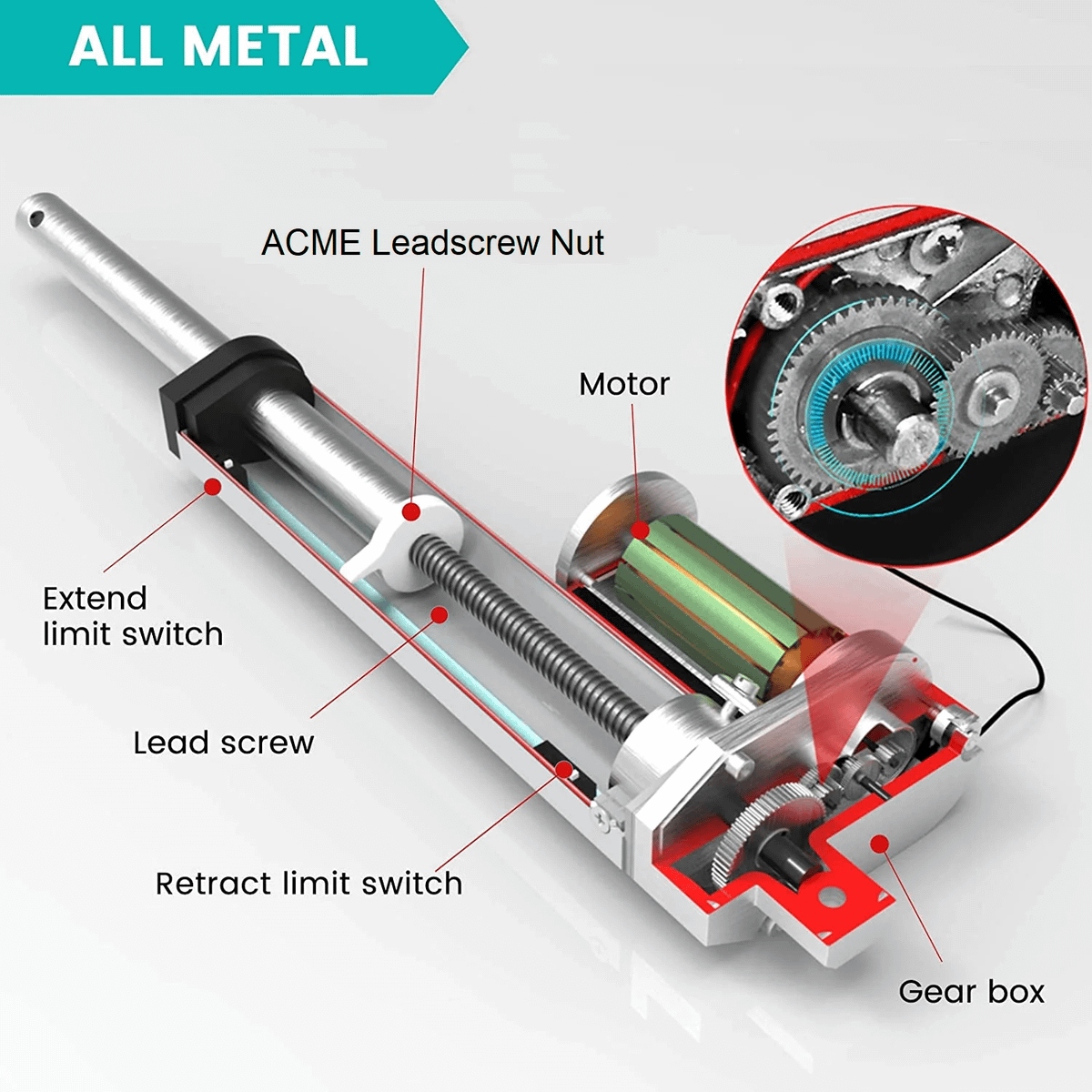
Let's look at the trade-offs for humanoids in a few key areas:
STRENGTH:
• Rotary: Consistent, predictable torque throughout motion - what you ask for is what you get
• Linear: Freakishly strong at sweet spots (Teslabot's knee can lift a grand piano!) but non-linear torque curve with diminishing effectiveness at range extremes
Winner: It depends. Linear for peak power, rotary for consistent performance
SUPPLY CHAIN DYNAMICS:
• China's established drone motor manufacturing creates rotary actuator ecosystem advantages
• Precision planetary roller screws require specialized manufacturing capabilities with limited suppliers for linear systems
Winner - Rotary. Manufacturing infrastructure creates path dependency in design decisions
VELOCITY:
• Rotary: Capable of human-equivalent walking/running speeds with direct power transmission
• Linear: Fundamentally limited by conversion inefficiencies and mechanical constraints
Winner: Rotary
No linear-actuated humanoid has demonstrated walking speeds above 1 mph
PRECISION & CONTROL:
• Rotary: Uniform precision across movement range with linear control relationships
• Linear: Variable precision with poor control authority at motion extremes
Winner: Rotary. Non-linear behaviour of linear actuators requires complex compensation
RANGE OF MOTION:
• Rotary: Can spin completely around if needed
• Linear: Limited to about 135° in practice (vs. human knees at 150°+) & hits "deadlocks" at extremes where they cannot generate force
Winner: Rotary.
MECHANICAL COMPLEXITY:
• Rotary: Integrated design with minimal articulation points
• Linear: Multiple joints, bearings, and linkages
Winner: Rotary.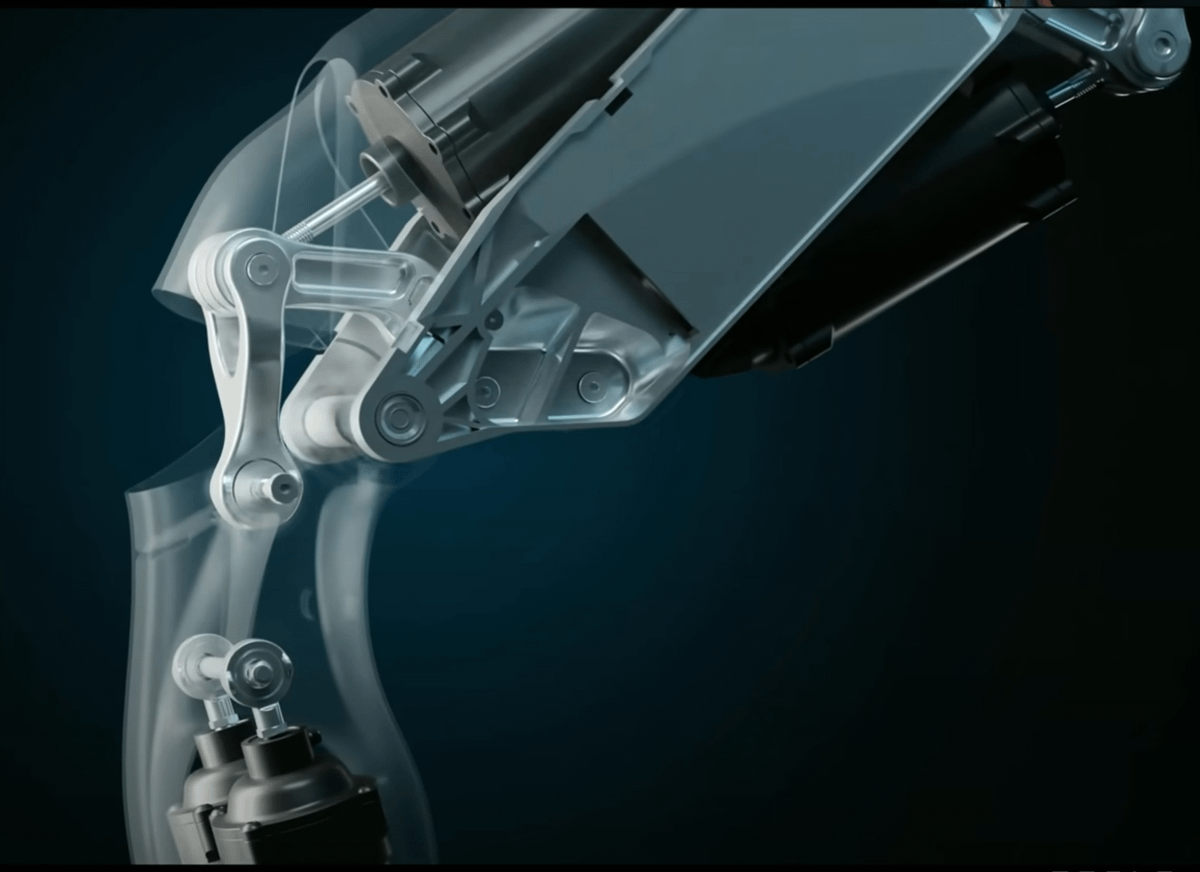
PACKAGING CONSIDERATIONS:
• Rotary: Concentrated mass at joint locations with potential form factor challenges
• Linear: Distributed along limb length, competing with electronics and power systems for internal volume
Winner: It depends. You can also use remote actuation to hide motors in "meaty" parts (forearm/calf), connect to joints via rods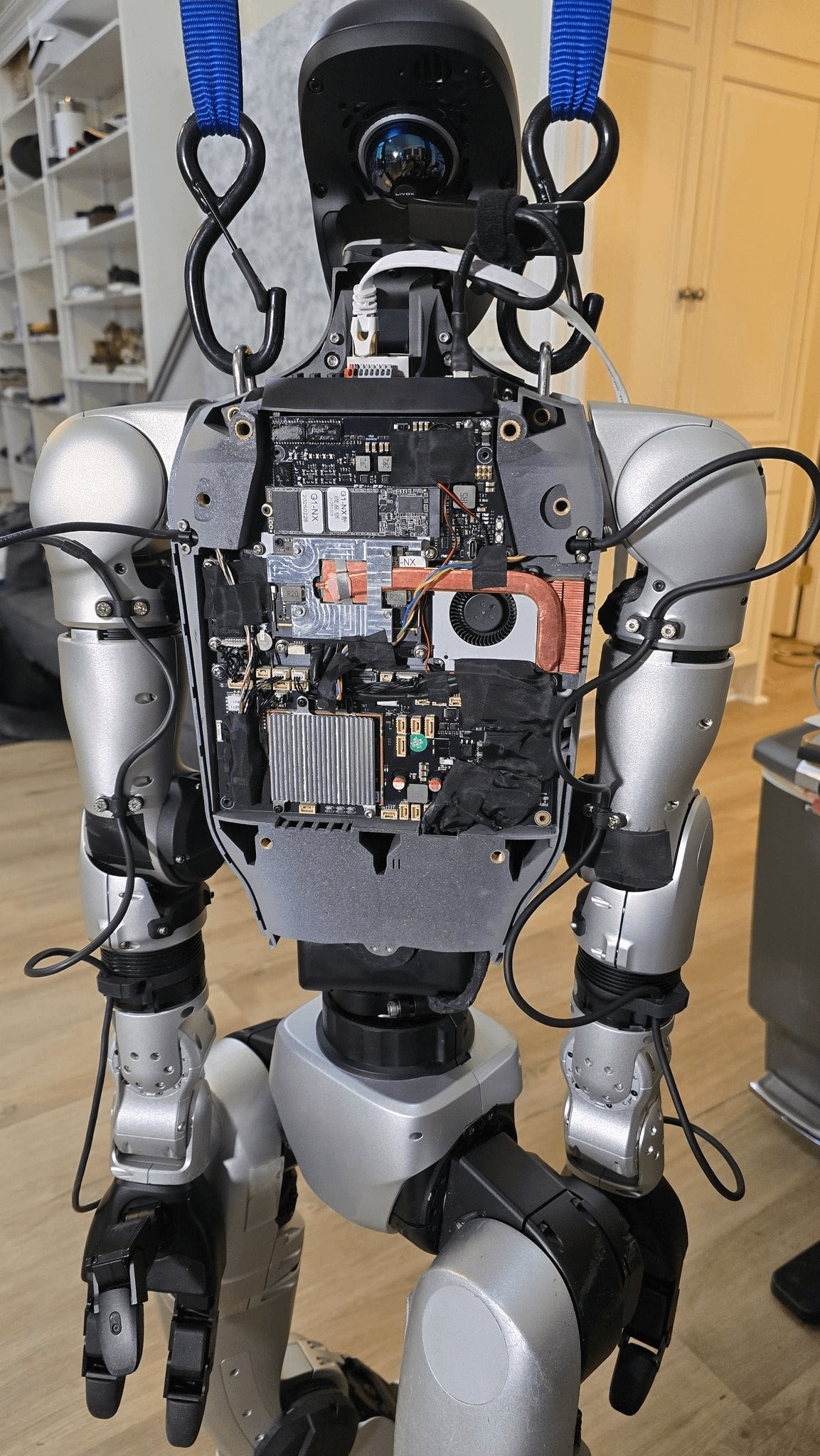
THE VERDICT:
• Rotary actuators are gaining dominance due to simplicity and advantages across the board
• Linear actuators still has their place, especially where strength is required
The best strategy to make a joint-by-joint assessment considering the specific goals & requirements of your robot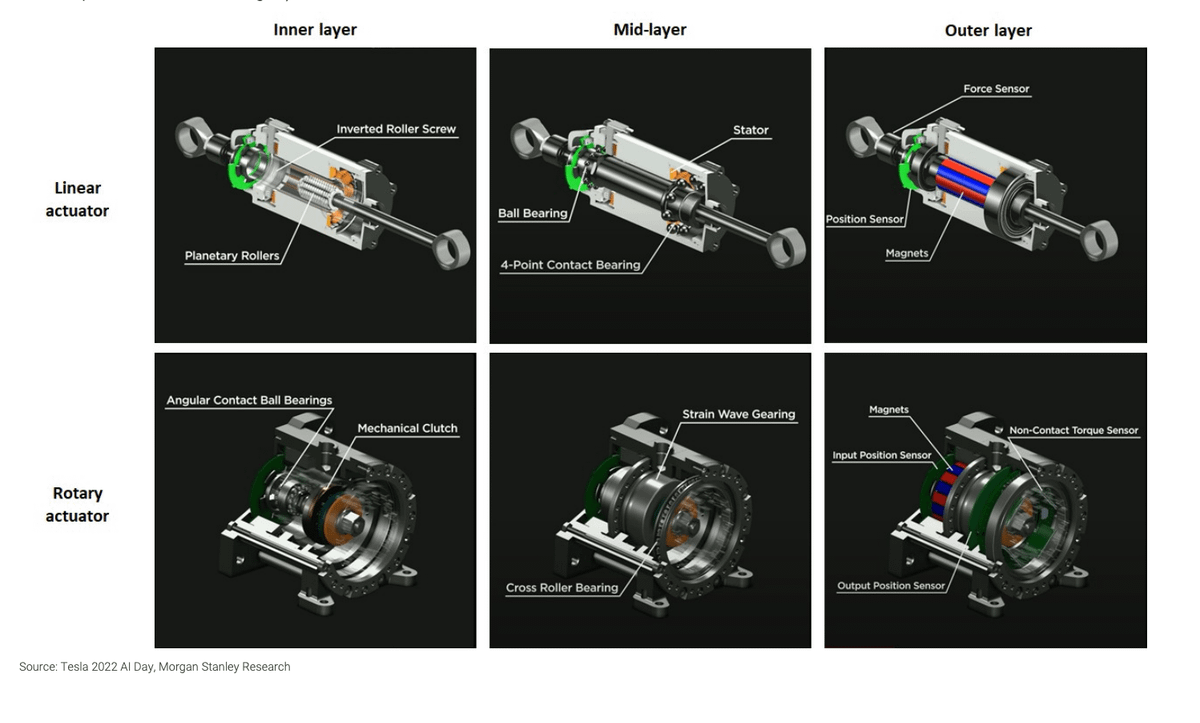
Check out the full podcast here. @GoingBallistic5 @MarwaEldiwiny
youtube.com/watch?v=8WwZzZcPvwM&t=4602s

Jack 🤖
@JacklouisP
🤖 / acc. I write about robotics @opterantech, we reverse engineer insect brains. Previous - Founder of a robotics R&D agency.